
Japaninoロボ Ep.2 ロボットの製作
2015/10/24
先回エントリにて、Japanino+EVOLTA4本+TA7291P+EVOLTA6本+RE-260モーターでモーター制御が可能である、という妄想をした。
実際にそうした材料を組み合わせて動くロボットを作成する。部品はAmazonと秋月電子で購入。
購入した部品
・アマゾンでのお買い物・
主にシャーシ部分にあたるパーツたち。
 |
楽しい工作シリーズ No.172 ユニバーサルプレートL 210×160mm (70172) (2009/06/23) タミヤ商品詳細を見る |
 |
楽しい工作シリーズ No.144 ボールキャスター 2セット入 (70144) (2009/06/23) タミヤ商品詳細を見る |
 |
テクニクラフトシリーズ No.7 4速パワーギヤボックスHE 72007 (2010/01/30) タミヤ商品詳細を見る |
 |
楽しい工作シリーズ No.111 スポーツタイヤ 56mm径 (70111) (2009/06/23) タミヤ商品詳細を見る |
・秋月電子でのお買い物・
主に回路部分を構成する部品たち。
 ブレッドボード・ジャンパーコード(オス-オス)セット 200円
ブレッドボード・ジャンパーコード(オス-オス)セット 200円
[BBJ-65]
通販コード C-05159
発売日 2011/09/19
メーカー CIXI WANJIE ELECTRONICS
 ブレッドボード EIC-301 150円
ブレッドボード EIC-301 150円
[165-40-4-3010]
通販コード P-00313
発売日 2005/01/01
メーカー E-CALL ENTERPRISE CO., LTD.
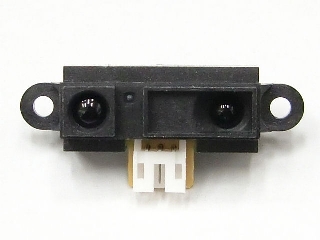 シャープ測距モジュール GP2Y0A21YK 400円×2
シャープ測距モジュール GP2Y0A21YK 400円×2
[GP2Y0A21YK]
通販コード I-02551
発売日 2008/09/10
メーカー シャープ株式会社(SHARP)
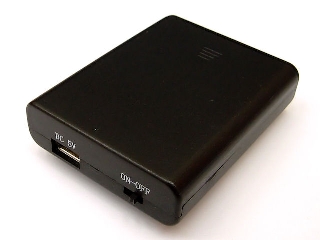
電池ボックス 単3×4本 USBコネクタ付 250円
[SBH-341-3S/USB]
通販コード P-02681
発売日 2008/10/28
メーカー COMFORTABLE ELECTRONIC CO., LTD(COMF)
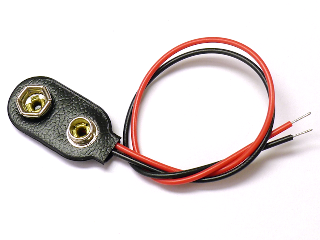 バッテリースナップ(電池スナップ・Bスナップ)「縦型」 40円
バッテリースナップ(電池スナップ・Bスナップ)「縦型」 40円
[BS-IC]
通販コード P-00452
発売日 2003/10/17
メーカー COMFORTABLE ELECTRONIC CO., LTD(COMF)
バッテリーケース(6本用)については、地元のパーツ屋さんで3×2となっているものを購入(画像参照)。秋月では取り扱いがないが、6本直列ものであればOK。
Japanino(大人の科学)と、エボルタ10本の購入は先述の通り。お忘れなく。
細かいお買い物としては、ホームセンターで径3mmのビスをたくさん購入。シリコンチューブを切ってビス通し、キャスターなどの高さを調節した。
結線図
モータードライバ2つ(モーター2つ)と、赤外線距離センサーをJapaninoに接続する。
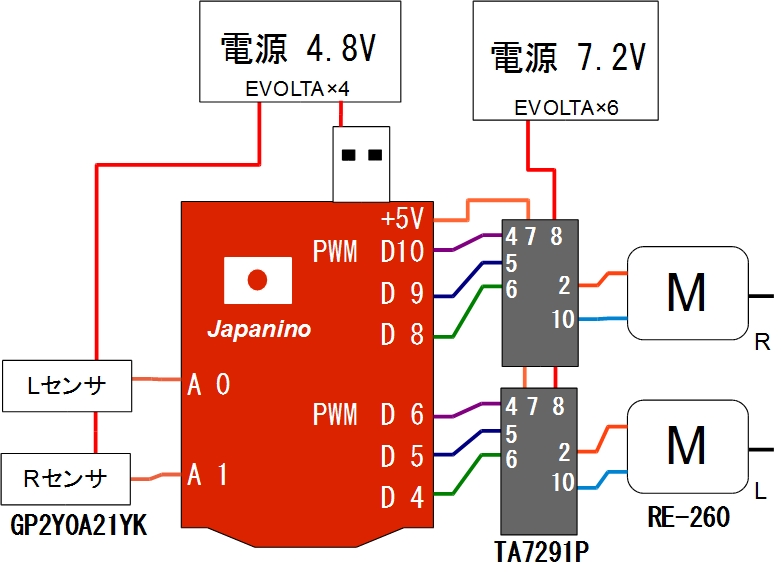
とにかく、電源について、制御系と負荷系を分けろ!がスローガン。さもなくば赤外線センサーが誤作動を起こす。その赤外線距離センサーの電源はちょっとした誤解で当初USBコネクタに直接はんだ付けしていたが、+5Vからとっても問題ないことが後に判明。これにより、(導線末端を足にするという作業を除いて)はんだ付けフリーでマイコンロボが作成できる!と謳える運びとなりました。
マイコンロボットの製作
・組み上がったマイコンロボット・(一部画像を加工してあります。)。
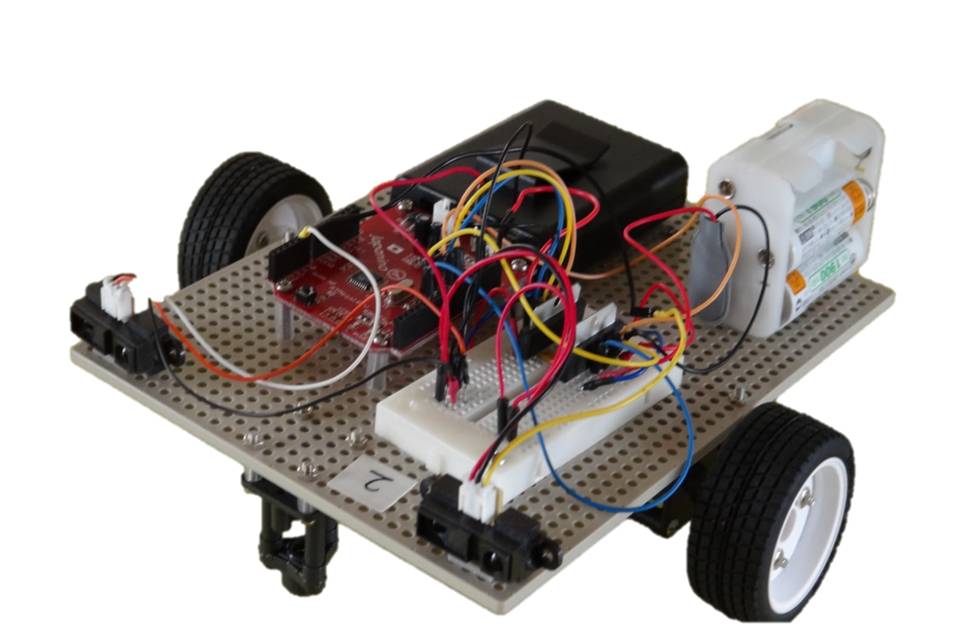
大目標がクラスボックス探査であったことから、研究班メンバーからは「探査機」と呼ばれることに。愛称募集中。
スケッチを送って基本動作のテスト。前進、後退、旋回を繰り返すプログラム。
(…スケッチ紛失。後日記憶をたどりながら作った復元スケッチ。)
void setup(){ pinMode(4,OUTPUT); pinMode(5,OUTPUT); pinMode(8,OUTPUT); pinMode(9,OUTPUT); analogWrite(6,100); //pwm値=100 analogWrite(10,100); //pwm値=100 } void loop(){ digitalWrite(4,LOW); //前進 digitalWrite(5,HIGH); digitalWrite(8,LOW); digitalWrite(9,HIGH); delay(3000); digitalWrite(4,HIGH); //後退 digitalWrite(5,LOW); digitalWrite(8,HIGH); digitalWrite(9,LOW); delay(3000); digitalWrite(4,LOW); //L旋回 digitalWrite(5,HIGH); digitalWrite(8,HIGH); digitalWrite(9,LOW); delay(1000); digitalWrite(4,HIGH); //R旋回 digitalWrite(5,LOW); digitalWrite(8,LOW); digitalWrite(9,HIGH); delay(2000); digitalWrite(4,LOW); //L旋回 digitalWrite(5,HIGH); digitalWrite(8,HIGH); digitalWrite(9,LOW); delay(1000); }
例によってArduinoでスケッチ作成。ボードに書き込みます。
・探査機の動作の様子・
衝突しまくっていますが、とりあえずスケッチ通り意図した動きをしているので合格!
パーツの合計金額は12000円強といったところ。もう少し切りつめられる要素はあるが、こちらも合格点ではなかろうか。電池代が4000円を超えるのは不本意ではあるが…。(その他Ardumotoはじめ試行錯誤の末不要となった部品多数。故障や検証の為に探査機は2台作成。財源なくほぼすべてが指導教諭のポケットマネーであったことは悔しいので書き添えておく。)
以上でJapaninoで安定して動くロボットのベース部分が出来上がったわけである。ちなみに、実時間ではここまでで丸1年を要している。
次回以降、赤外線センサーを用いた障害物回避に取り組む。